Mở đầu
Nghiên cứu về Epipolar Geometry - Stereo để hiểu thêm cac phép transform và homographic

Chúng ta có thể lấy được vị trí 3D với ảnh của point trên 2 image

Parallel Calibrated Cameras

Trong trường hợp này, ta biết intrinsic và extrinsic của 2 camera là như nhau. Ta gọi khoảng cách giữa 2 camera là baseline.
Với 2 camera có intrinsic và extrinsic, ta tính được vị trí tương đối của object 3D bằng đơn vị pixel. Vì vậy cần thêm yêu tố baseline để tính được so với vị trí teo world












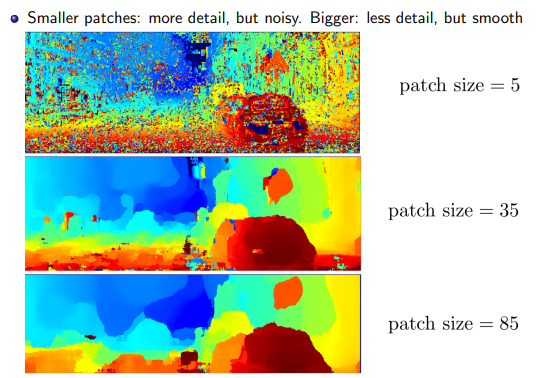
Tuy nhiên cũng cần chỉnh tham số patch phù hợp
Epipolar Geometry - General Cameras

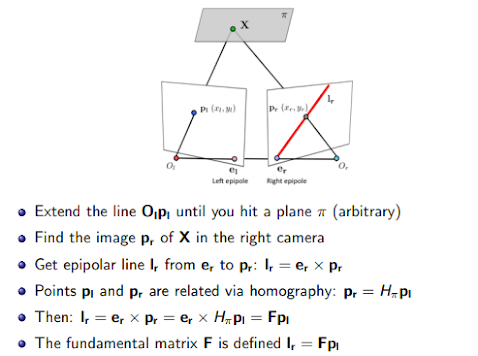
Trường hợp này 2 image plane sẽ không trùng nhau, nên ta có line hình chiếu (epipolar line) cũng không song song hay trùng nhau
Ta gọi plane bởi 3 điểm Ol, Or và P là epipolar plane, chứa cả 2 epipolar line
Quan sát rằng với mỗi 3D points khác nhau sẽ tạo các epipolar line khác nhau, nhưng vẫn đều đi qua các epipole point (left epipole và right epipole)
Tương tự cũng hoạt động với trường hợp đi thẳng

Ta sẽ chứng minh rằng có thể tìm match point của mỗi điểm tại left image thông qua 1 matrix 3x3 F, gọi là Fundamental matrix. Dựa vào F, ta có thể biến các epipolar lines thành horizontal

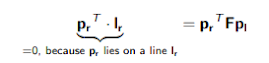
Vì vậy: Trở về bài toán tìm F từ matching point:
Trở về bài toán tìm F từ matching point:

Khi đã có F, ta có thể tính được homographies để chuyển mỗi image plane thành dạng parallel. Đến đây ta xử lí như trường hợp trước


Qua biểu thức, để tính Pr, ta chỉ cần thêm er. Ta có er nằm trên epipolar line lr, vậy  Mà
Mà 





Structure From Motion
Là việc có nhiều hơn 2 views với cùng một scene
vậy
Summary
Là việc có nhiều hơn 2 views với cùng một scene
Khi đó ta có bài toán optimize sử dụng minimizing re-projection error:
Tham khảo
- https://www.youtube.com/watch?v=PFQ3A7TEMIo&ab_channel=PratikJain
- http://www.cs.toronto.edu/~fidler/slides/2021Winter/CSC420/lecture12.pdf
- https://www.youtube.com/watch?v=izpYAwJ0Hlw&ab_channel=FirstPrinciplesofComputerVision
- http://www.cs.toronto.edu/~fidler/slides/2021Winter/CSC420/lecture13.pdf
Nhận xét
Đăng nhận xét